วงจรกลับทางหมุนหลังจากหยุดมอเตอร์ (Reversing after stop)

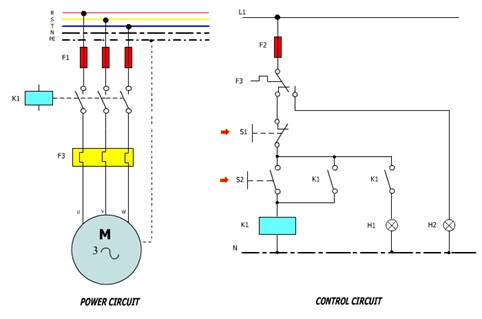
ลักษณะการกลับทางหมุนหลังจากหยุดมอเตอร์ หมายถึง วงจรจะกลับทางหมุนมอเตอร์ได้ เมื่อทำการหยุดมอเตอร์ก่อนเท่านั้น การเริ่มเดินมอเตอร์จะเริ่มเดินให้หมุนขวาหรือซ้ายก่อนก็ได้ โดยการกดสวิตช์ S2 หรือ S3 และเมื่อต้องการหยุดมอเตอร์ก็สามารถทำได้โดยการกดสวิตช์ S1 (OFF) วงจรกำลัง วงจรควบคุม ดูการทำงานของวงจร ลักษณะการทำงานของวงจร 1) คอนแทกเตอร์ K1 ทำหน้าที่ต่อให้มอเตอร์หมุนขวา และคอนแทกเตอร์ K...